Realizzata la prima mano robotica che percepisce il movimento e lo riproduce in modo naturale. Il risultato, pubblicato sulla rivista Science Advances è frutto della ricerca coordinata dalla Scuola Superiore Sant’Anna di Pisa, con il gruppo di Christian Cipriani, e condotta in collaborazione con Paul Marasco dell’Università di Cleveland e con l’Azienda Ospedaliero-Universitaria Pisana.
La rivoluzione nella protesi è resa possibile da un’interfaccia che ripristina le sensazioni di movimento nelle persone amputate utilizzando le vibrazioni generate da magneti impiantati nei muscoli residui dell’avambraccio. La nuova tecnologia è stata integrata nella mano robotica sviluppata dallo spin-off della Scuola Sant’Anna Prensilia ed è stata sperimentata per sei settimane su un uomo di 34 anni.
La nuova tecnologia
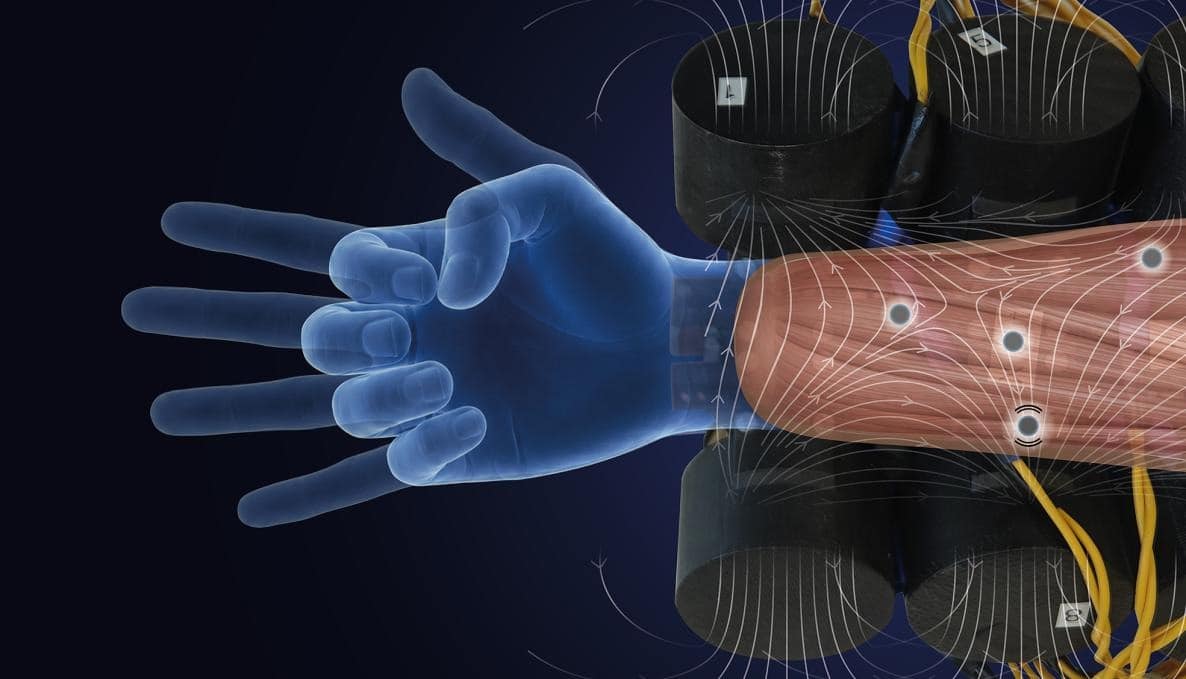
La nuova tecnologia è composta da piccoli magneti impiantati nei muscoli dell’avambraccio e in una serie di bobine esterne che li fanno vibrare da remoto in modo mirato. Il risultato è la stimolazione dei muscoli, una vibrazione che fa nascere la sensazione di movimento naturale. In questo modo, la persona che l’ha testata è riuscita a percepire la mano che si apriva e si chiudeva con movimenti coordinati, molto simili a quelli reali.
La myokinetic kinesthetic interface, così si chiama, “è unica nel suo genere: grazie a un semplice impianto passivo e mininvasivo, siamo in grado di stimolare la muscolatura senza alcun contatto con la pelle. Si tratta di una sorta di stimolazione intracorporea, che non solo può essere la chiave per comprendere meglio come funziona il controllo motorio umano, ma anche per capire come ripristinarlo in persone che subiscono un’amputazione”, osserva il primo autore della ricerca, Federico Masiero, al tempo degli esperimenti dottorando presso la Scuola Sant’Anna e oggi all’Università Tecnica di Monaco.
Il prossimo obiettivo è sfruttare simultaneamente i magneti impiantati sia per il controllo della protesi sia per la restituzione di percezioni sensoriali naturali. Un passaggio fondamentale per arrivare ad una soluzione che possa effettivamente cambiare la vita di persone con amputazione è la realizzazione di un impianto permanente.
“L’impianto era stato progettato per durare sei settimane, un tempo che ritenevamo sufficiente per una prima verifica dell’utilità e dell’efficacia dell’interfaccia. I risultati sono stati molto promettenti e ci hanno spinto a esplorare una soluzione impiantabile permanente, finanziata dal Piano Nazionale Complementare al PNRR con il progetto Fit 4 Medical Robotics, che ci consentirà di studiare l’interfaccia su periodi molto più lunghi e con un numero maggiore di partecipanti”, annuncia il professore della Scuola Sant’Anna Christian Cipriani, ideatore dell’interfaccia e coordinatore dello studio.